







 Mustaghfiri Asror
Mustaghfiri Asror

Kontrol PI
Suatu pengontrol proporsional yang memberikan aksi kontrol proporsional dengan error akan mengakibatkan efek pada pengurangan rise time dan menimbulkan kesalahan keadaan tunak (offset). Suatu pengontrol integral yang memberikan aksi kontrol sebanding dengan jumlah kesalahan akan mengakibatkan efek yang baik dalam mengurangi kesalahan keadaan tunak tetapi dapat mengakibatkan respon transien yang memburuk. Pengetahuan tentang efek yang diakibatkan oleh masing-masing pengontrol tersebut yang nantinya akan digunakan dalam penentuan nilai-nilai penguatan proporsional (Kp) dan integral (Ki). Tabel basis pengetahuan hubungan antara penguatan dan efeknya pada pengontrol PI diperlihatkan pada Tabel 1 dibawah ini.
Tabel 1 Efek dari pengontrol P dan I.

Penguatan Rise time Overshoot Setling time offset
Kp menurun meningkat perubahan kecil terjadi
Ki menurun meningkat meningkat menghilangkan
Gabungan aksi kontrol proporsional dan aksi kontrol integral membentuk aksi kontrol proporsional plus integral ( controller PI ). Gabungan aksi ini mempunyai keunggulan dibandingkan dengan masing-masing penyusunnya. Keunggulan utamanya adalah diperolehnya keuntungan dari masing-masing aksi kontrol dan kekurangan aksi kontrol yang satu dapat diatasi. Dengan kata lain elemen-elemen controller P dan I secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem dan menghilangkan offset.
Dalam waktu kontinyu, sinyal keluaran pengendali PI dapat dirumuskan sebagai berikut.
dengan
Co = sinyal keluaran pengendali PI.
Kp = konstanta proporsional.
Ti = waktu integral.
Ki = konstanta integral.
e(t) = sinyal kesalahan.
e(t) = referensi – keluaran plant).
Diagram blok pengendali PI dapat dilihat pada Gambar 1.

Gambar 1 Diagram blok pengendali PI.
Pengolahan parameter-parameter PI menjadi konstanta-konstanta pengendalian secara diskrit sesuai dengan penjelasan perhitungan berikut. Berdasarkan persamaan 2.1 dengan menggunakan Transformasi Laplace, didapatkan persamaan PI dalam kawasan S sebagai berikut.

Persamaan ini diubah kembali ke kawasan waktu, sehingga menjadi :


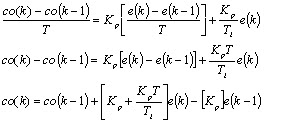
Persamaan ini menunjukkan persamaan pengendali PI dalam bentuk diskrit. Dari persamaan ini dapat diketahui bahwa pengendali PI menggunakan konstanta-konstanta pengendalian sebagai berikut :
dengan


Penalaan pada pengontrol PI adalah penentuan besaran penguatan-penguatan P dan I sehingga diperoleh karakteristik sistem yang baik. Ada beberapa cara penalaan kontroler PI diantaranya yaitu metode relay feedback Ziegler-Nichols, manual (hand-tuning/trial-error), metode analitik dengan optimasi, penempatan pole (pole placement), atau swatala (auto tuning).
Artikel terkait:
- Pengendali Proporsionl
- Pengendali Integral


































